Разработка нейронной сети – аналога модуля «Поиск оптимального маршрута для одного БЛА»
Для замены модуля «Поиск оптимального маршрута для одного БЛА» будем использовать нейронную сеть с прямыми связями (feedforward network) с одним скрытым слоем, на вход которой будут подаваться следующие значения:
относительные координаты по оси X для каждого объекта (Дx);
относительные координаты по оси Y для каждого объекта (Дy);
относительный угол курса для каждого объекта (Дш);
скорость каждого объекта (Vi);
скорость БЛА (V);
минимальный радиус разворота БЛА (Rmin).
Количество нейронов будет выбираться экспериментальным путем. Количество выходных нейронов будет соответствовать количеству объектов, на которое данная нейронная сеть рассчитана. Выходные значения нейронной сети будут формироваться таким образом, что, тот выход, который соответствует следующему в маршруте объекту (то есть тому объекту, к которому сейчас необходимо двигаться БЛА), будет переходить в активное состояние (значение этого выхода станет равным «1»), а все остальные выходы останутся в пассивном состоянии (их значение будет установлено в «0»). Данная нейронная сеть изображена на рисунке 1.3.1.
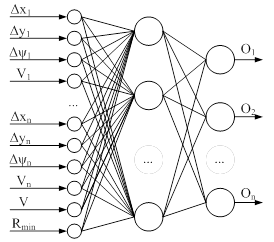
Рисунок 1.3.1 Нейронная сеть для замены модуля поиска оптимального маршрута
Вследствие того, что нейронная сеть выдает не весь маршрут, а только номер следующего его пункта, процесс нахождения оптимального маршрута теперь будет проходить в несколько итераций следующим образом. Сначала вычисляются относительные координаты всех объектов относительно текущего положения БЛА. Затем вычисляется время t, необходимое для подлета к этому объекту, а сам объект исключается из дальнейшей обработки. После этого рассчитывается новое положение всех объектов, которое они займут через время t. После этого запускается следующая итерация алгоритма для обновленных значений координат объектов. [5]
Похожие статьи:
Моделирование и оценка качества переходных процессов
Если расчёт переходных процессов предполагается производить по каналу внешнего возмущающего воздействия , т.е. со стороны потребителя энергии, тогда принимают И напротив, когда имеется намерение рассчитать переходные процессы по каналу изменения задания регулятору,в режиме маневрирования двигателем ...
Капитальные вложения
При проектировании новой конструкции, капитальные вложения определяются по формуле: Кпр=К1+К2+К3, тыс. тенге (3.1) где К1 - стоимость устанавливаемого оборудования, тыс. тенге; К2 - затраты на монтаж устанавливаемого оборудования, тыс. тенге; К3 - транспортно-заготовительные расходы, тыс. тенге Сто ...
Льготники приносят РЖД многомиллиардные убытки
Убытки компании «Российские железные дороги» (РЖД) от перевозок льготников в пригородном сообщении в 2006 году составили 5,1 млрд. рублей, в 2007 году этот показатель может достичь 7 млрд. рублей. Об этом сообщил министр транспорта РФ Игорь Левитин в ходе селекторного совещания. По словам министра, ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация